

Article
Related Links
Takashi IMAMURA, Hagito YAMASHITA, Zhong ZHANG, MD Rizal bin OTHMAN and Tetsuo MIYAKE
Department of Production Systems Engineering
Toyohashi University of Technology
1-1, Hibarigaoka, Tempaku, Toyohashi, Aichi, JAPAN
Email: [email protected]
Abstract—Prevention for car accident is one of main issue in the car-oriented society. This research aims at the development of fundamental solution for decrease the car accidents. For this purpose, driver model for evaluation of abnormal driver’s operations through the handling behavior are proposed. In this paper, analysis method for driver’s operations of left-turning in a intersection and sensing method using steering wheel with pressure sonsors have been discussed. Through the experimental results and questionnaire survey with 11 subjects, validity of the proposed analysis method has been confirmed. And the basic design of steering wheel for sensing also defined based on the grabing style survey.
Index Terms—Safe driving assistance, Driving behavior, Steering wheel for sensing
I. INTRODUCTION
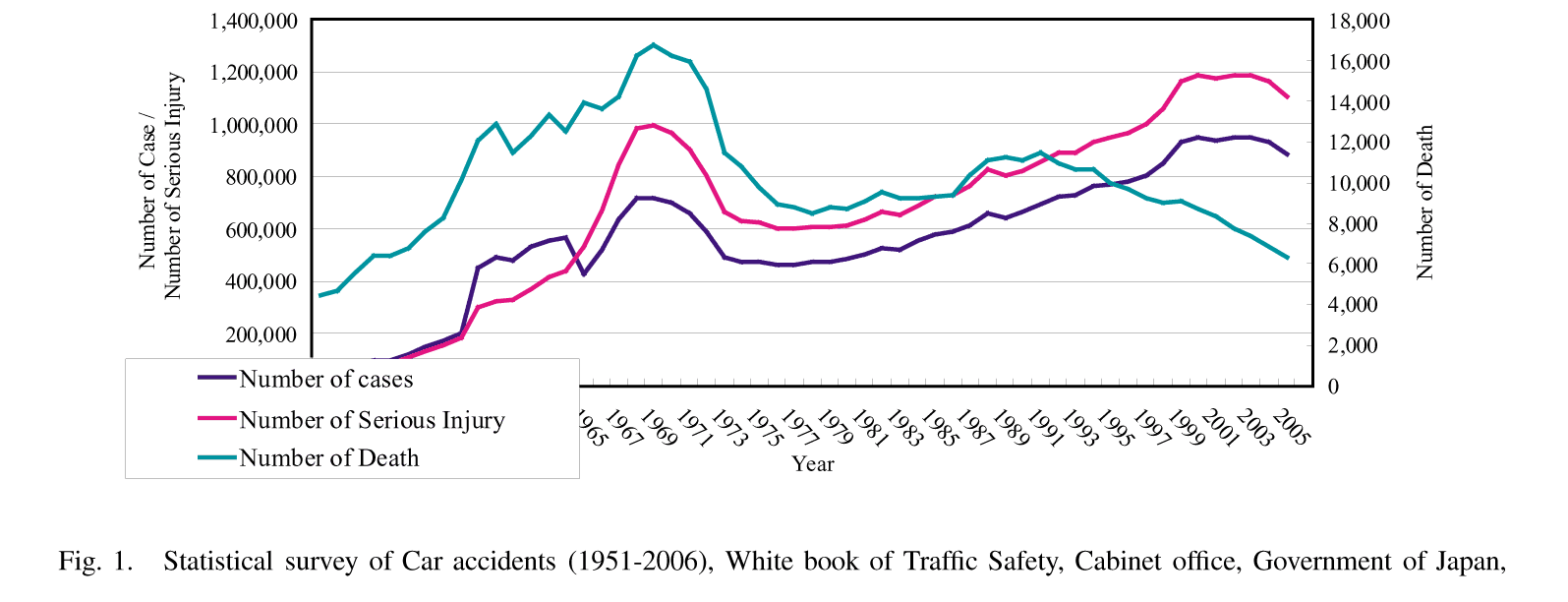
In recent years, the number of death for car accident has decreased according to the development and the implementation of crash safety system for vehicle and drivers, for example, Air bag system, Energy-absorbing chassis and Braking-assist system etc. However, the number of car accident has still keeping high compare with last 20 years. According to a statistical survey of ITARDA(Institute for Traffic Accident Research and Data Analysis, Japan) and White book of Traffic Safety, Cabinet office, Government of Japan show that more than 6,000 accidents are occur every year(Figure 1). And analysis result of them shows that more than 70[%] of the reasons of accidents are cognitive and judgment error of the car driver. These matters are one of big problem in our daily life, therefore several researchers and companies also try to develop a new technology which can decrease this kind of accidents to minimize. To develop the prevention method for car accidents, there are 2 kinds of mainly strategies. First one is Car-centered systems which acquire several information around the car driving environment, for example, distances of cars, map of cruse or friction between the road and tire and so on. Then these systems indicate the caution or assist control vehicle it self with judgment the driver’s operation is safety or not. In this kind of system, there is a possibility that the caution and assist control could not adapt for the driver, and it also makes another possibility to the accident. Second one is drivercentered systems which observe several drivers conditions through a camera, microphone and various kinds of biological sensor. In this system, analysis for the relationship between the observed information and driver’s state is important. Andthe robustness for sensors against the environmental noise and individuality of drivers is also necessary.
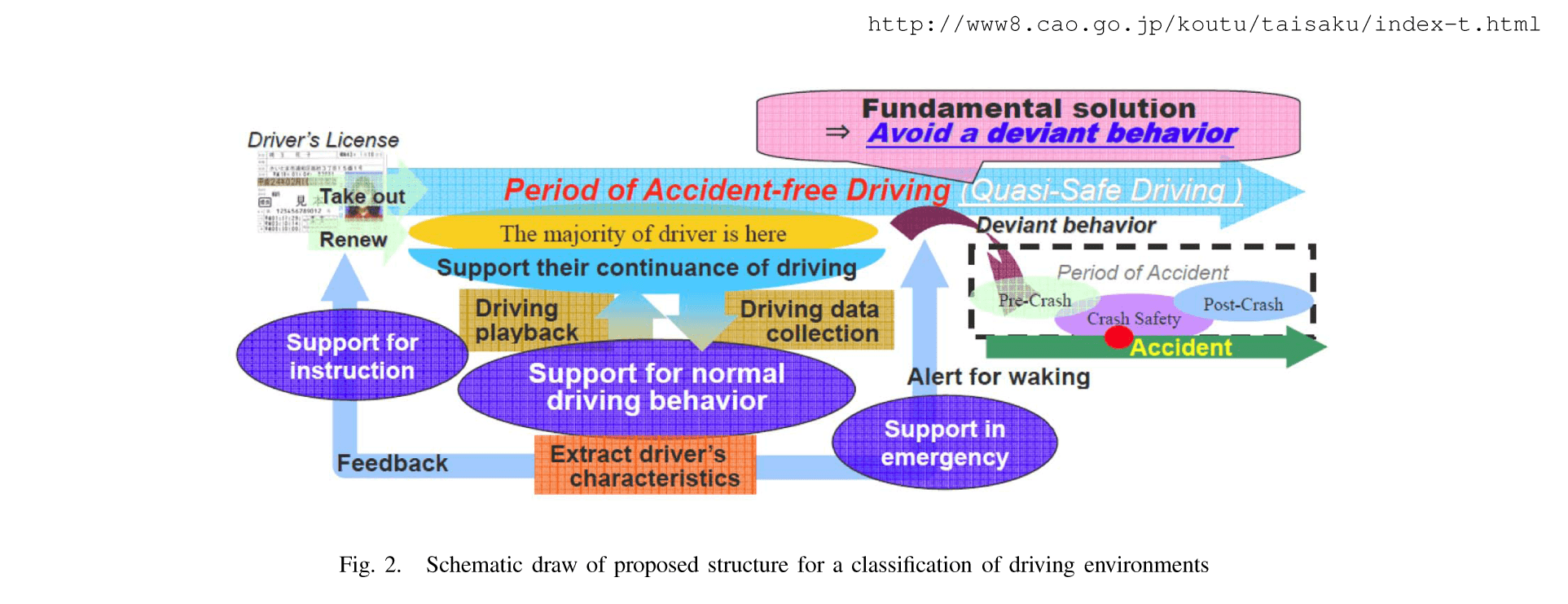
In our research group, we propose the assistance strategy for safety driving focus on the driver’s conditions. The outline of proposed strategy is shown in Figure 2. In this strategy, driving situation without accidents is considered as quasi-safe driving, and the situation of the car accident is also considered as the result of deviant driving behaviors from normal behaviors. In this structure, several accidents are considered as the results of deviant behavior of driver, moreover, it is thought that their deviant behavior will be caused by suddenly changes of driving environment. And it is also caused by unstable situation of driver who is accumulating for driving experiences.
Therefore, in order to keep safety for drivers operation and decrease the car accident, the classification of their driving behavior into normal behavior or abnormal one through their operations will be useful. “Normal behavior” defined here means the majority of behaviors in each driver in their daily driving, and “Abnormal behavior” is defined as the behavior which is influenced by mental or physical factors inside the driver. If it is possible that the numerical modeling for the driver’s characteristic from the statistical analysis, the assistance may be achieved considering with driver’s adaptability of operation. And these characteristics will be also able to use for driver’s instruction support or support in emergency of driver. In addition, if this kinds of strategy implement only using driving behaviors, there is no necessory to install large scale sensing system for the environment to in-vehicle system.
Therefore, a sensing method for driver’s operation using steering wheel has been proposed in this research. As a fundamental research, the analysis for driving behaviors and questionnaire surveys about grabbing style for steering wheel were conducted through the experiments by using the driving simulator system. In this paper, analysis for the drivers steering operation from the viewpoint of the detection for driver’s normality or abnormality have been discussed. And these analysis results were validated by using the questionnaire survey for the subject persons.
II. EXPERIMENTAL SETUP
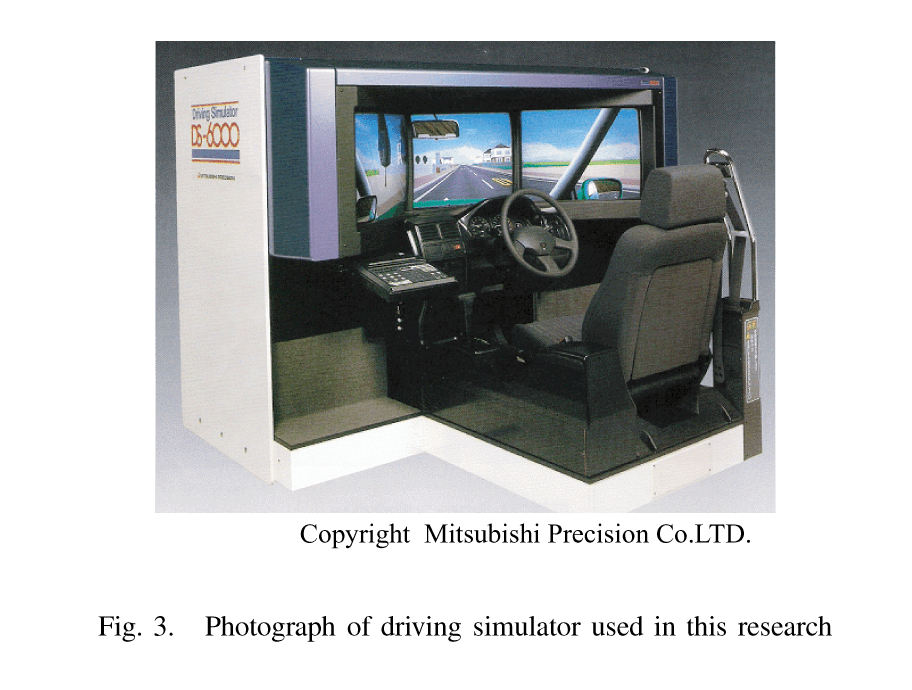
The experimental setup used in this paper is shown in Figure 3. As driving experiments, subject persons did car driving on the driving course (Figure 4) at the simulator system. The driving simulator can collect the driving (Control for Gas pedal, Break pedal, Steering wheel and other peripherals inside a Car) in sampling frequency 10[Hz]. And grabbing styles of Steering wheel were recorded by Movie camera.
In addition, at the end and mid-terms of experiment, questionnaire surveys were also conducted. In this experiment, 3 kinds of driving courses.
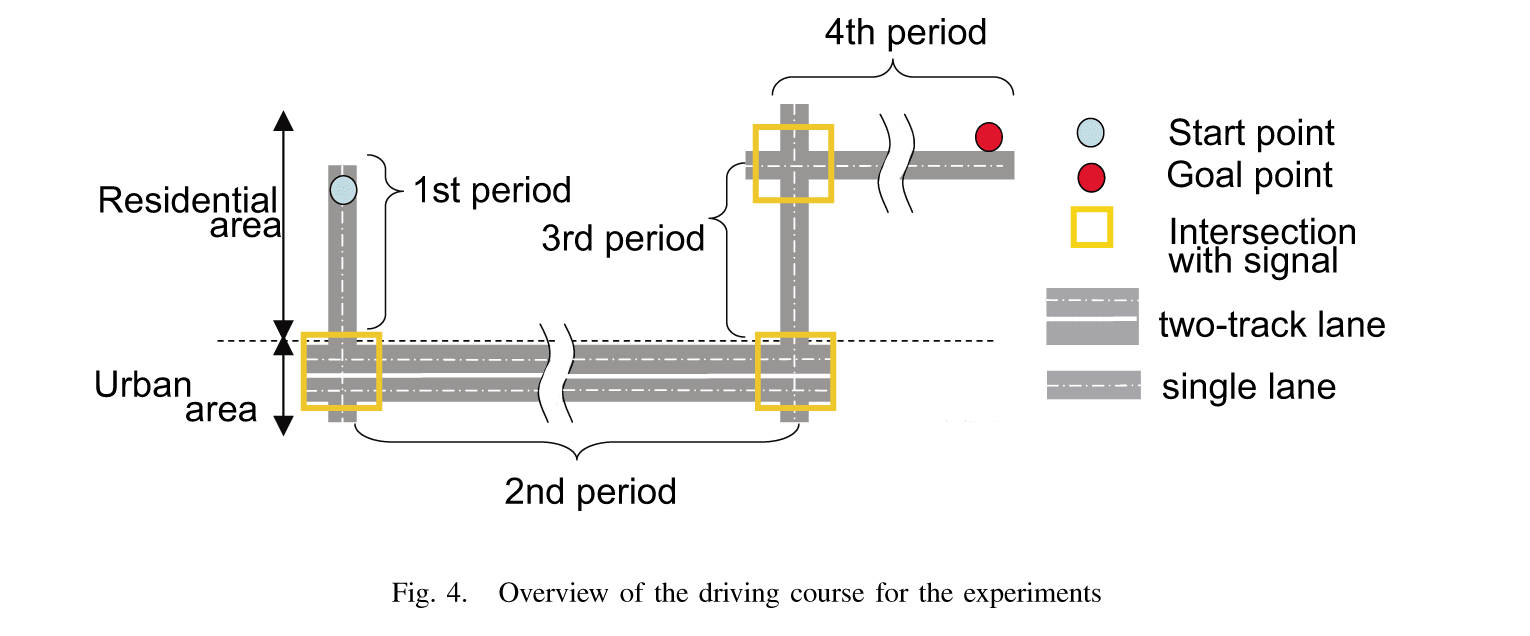
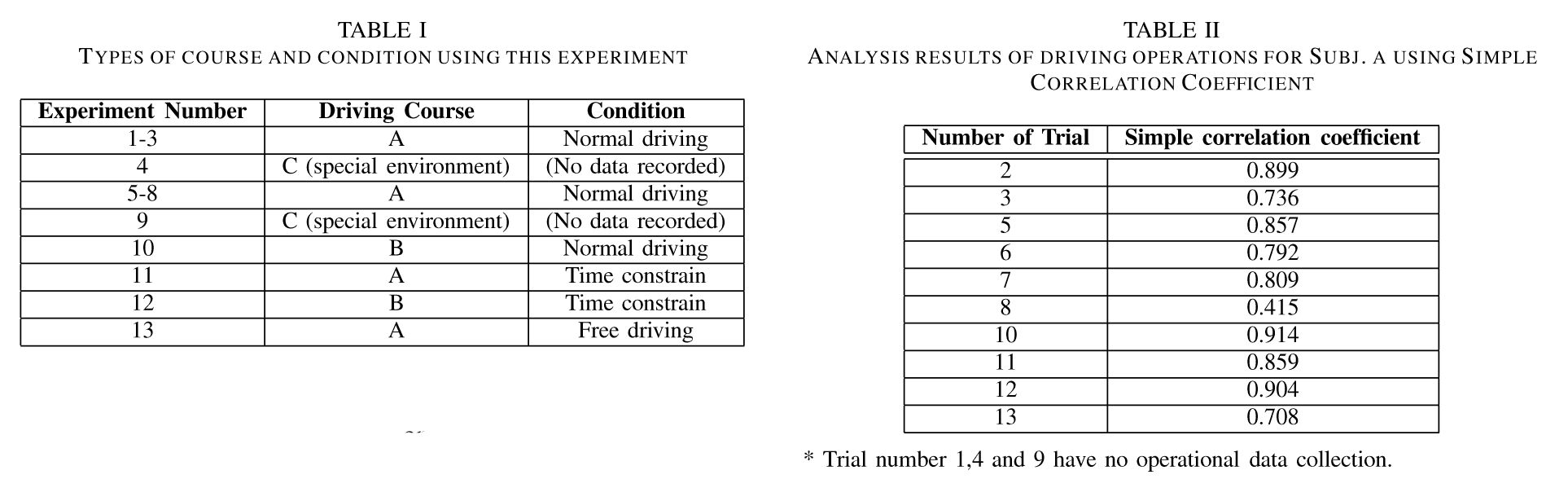
and 4 kinds of driving situation were used as shown in Table I, and number of trials for driving was 13 par one subject person. In large part of experiments, driving course A was used. The structure of driving course A has “r
esidensial area” and “urban area” as shown in Figure 4. Generally, driving simulator system is used to have the experiences for car accidents or to show the dangerous situation for beginner of driver in the driver license school. However, There is no event or factor which will cause the accidents or troubles at the course A. Although driving course B has same structure of course A, it has small differences of the driving enviroment. There are several cars like a foregoing creeping taxi or closing autotruck behind the driver’s car. And they make mental stress for subject drivers. We conducted the experiment to record the normal behaviors of subject drivers using driving course A and B with asking representation of their ordinary driving on the simulator.
On the other hand, 13 number of trials on this experiment is necessary to observe for driver’s behavior, but it is so hard to keep their commitment. Moreover, suddenly changes for driving environments are also needed. From these reason, 2 times of driving in special environment (driving in snowy, rainly, dirt road and night) are inserted as course C.
All of the experiments were conducted after obtaining informed consent of subject drivers.
III. ANALYSIS METHODOLOGIES
In this paper, two kinds of analysis methodologies are discussed as following.
A. Correlations of driving operation
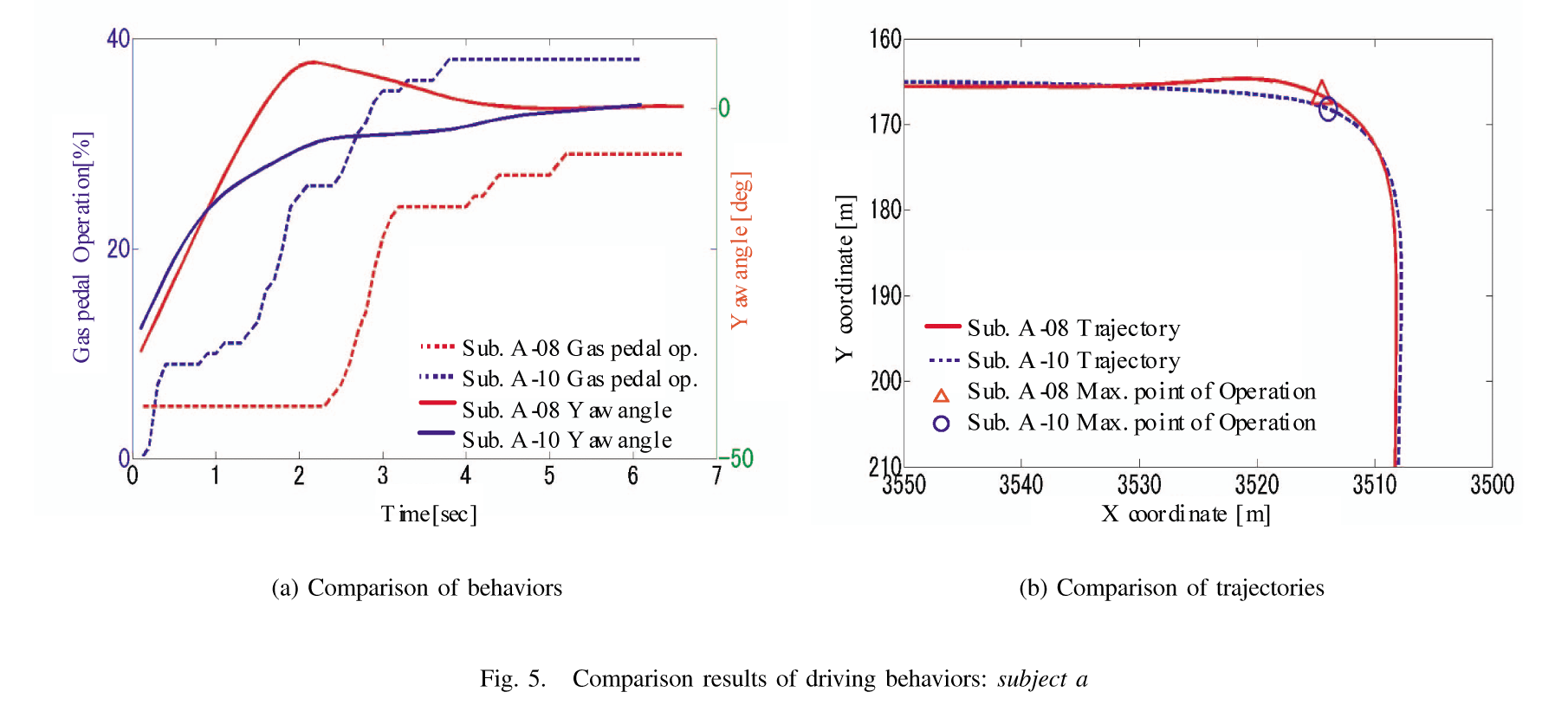
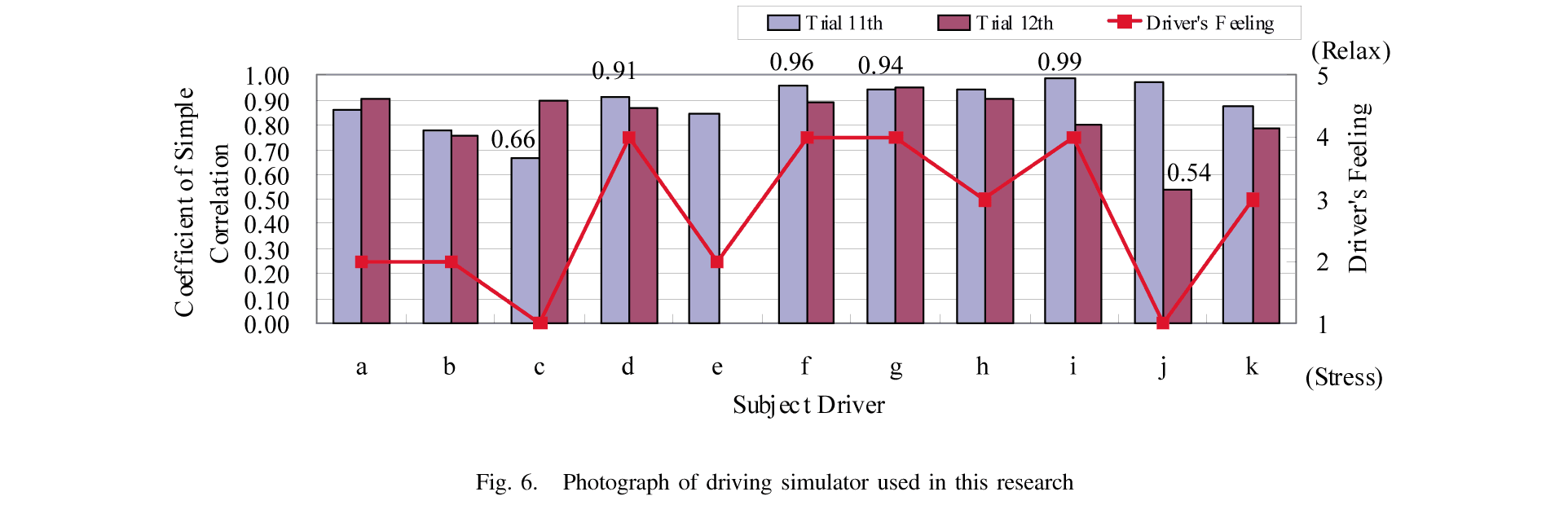
As the first methodology, the simple correlation analysis have been considered in order to classify the driver’s behaviors. In this research, the driver’s operations of steering wheel, gas pedal and brake are defined as basic operation related to the vehicle behavior, “cruising”, “stopping” and “cornering”. And the almost vehicle behaviors are consisted of these three kinds of basic behaviors. In the proposed methodology, the cooperativeness of basic operations is evaluated by using simple correlation analysis and its coefficient with cornering behavior for turn left on the intersection. Table II shows the analysis results of driving operation of subject driver a using Simple Correlation between steering wheel operation and vehicle velocity at the case of turning left in an intersection. In this result, the correlation coefficient at the trial number 8 has small value compare with other trials. Figure 5 shows the comparison result of vehicle behavior between trial number 8 and 10. This figure shows that the vehicle trajectory at the trial number 8 has deviant from the shape of the intersection corner. From these results, cooperativeness of 2 kinds of driving operation can be describing the one of deviant behavior. Figure 3 shows the comparison results between Simple Correlation and Driver’s feeling at the cases of trial with time constrain based on questionnaire survey. In this result, Subjct c and j have low value of feeling which means that trials with time constrain make their stress for driving. And the Correlation values of them also have low value compare with other subject drivers. On the other hand, Subject d, f, g and i who has no stress in the trials, and they have high value of Simple Correlation. From these results, the proposed analysis method has an possibility to evaluate their normality and abnormality. However, the questionnaire survey was conducted only one time for two times time constrain experiments in order to decrease the influences for their behaviors by the questions. As the future work, reasonable conditions between the experiments and questionnaire survey must be consider to make clear the relationship of analysis results
B. Correlations of driving operation
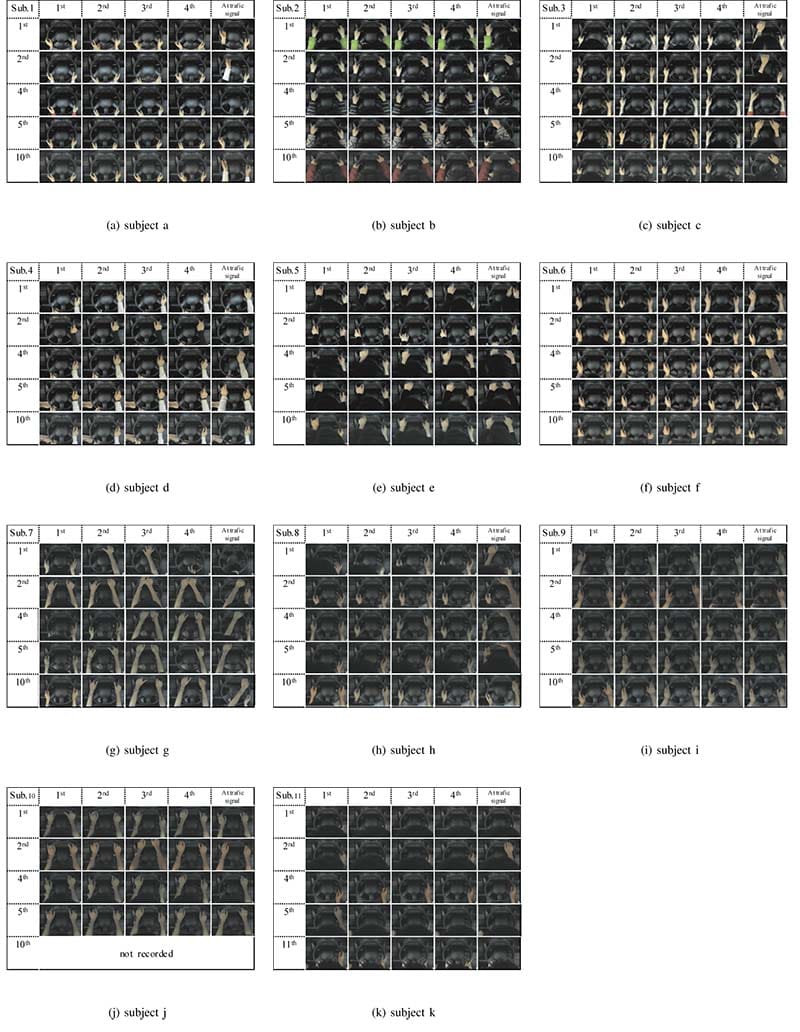
Figure 7 shows results for grabbing style of driver’s hands in the experiment. They were picked up from the movie as the majority style in each period of driving course and at 4 kinds of trial. These results show that the grabbing style has individual characteristics strongly in each person. In addition, there are almost no differences between trial number 1-5 and 10 even though the driving situation has time constrain and it makes driver’s stress. Moreover, it was clarified that 80[%] of the subject drivers were not aware of their grabbing style through the questionnaire survey. And they also could not found their own grabbing style from the sample photographs.
From these results, the grabbing the steering wheel is one of unconscious behavior of driver, and it has the possibility to estimate their internal state by observing for their grabbing styles. In order to investigate more precise grabbing behavior, integrated steering wheel with pressure sensors or tactail sensors is designing based on their grabbin styles for sensor assignment.
IV. PROTOTYPE OF STEERING WHEEL SENSING SYSTEM
In previous sections, driving behaviors such as acceleration, decelaration and steering wheel operation were discussed from the view point of cooperativeness between behaviors. From the analysis results of them, it was suggested that the decleasing of cooperativeness for driving behaviors related to their feelings. In order to confirm these results by using biological information, Steering wheel sensing system have been proposed in this research. This sensing system is developed aiming to sense the driver’s biological signals include handling force, body temperature, heart rate and so on from the body surface of their hands. However, the sensing method with putting or fitting the sensor probes on their body brings discomfort or unusual feeling to the driver. And this point also makes difficulty for human sensing in vehicle driving environment.
On the other hand, in generally case, almost drivers grab the steering wheel by bear hand when they drive, it also means that this behavior have a possibility to achive the directory and naturally human sensing. Therefore, the prototype of steering wheel sensing system have been designed based on the grabbing characteristics as shown in Fig.7.
Fig.8 shows the overview of prototype of steering wheel sensing system. In this steering wheel, 28 units of small pressure sensors(Tactilus Free form Sensor, Sensor Products INC.) have installed to measure the driver’s grabbing point and its force. The arrangement of them was devided to “standard points” and “shape depended points”. The standard points of sensor arrangement were set to 12 points (22 units) on 30 degrees apart in a circle of steering wheel, and they were decided based on the standard size of human hand. In contrast, shape depended points of sensor arrangement were set to 6 points (6 units) on the intersection points of circular spoke part of steering wheel.
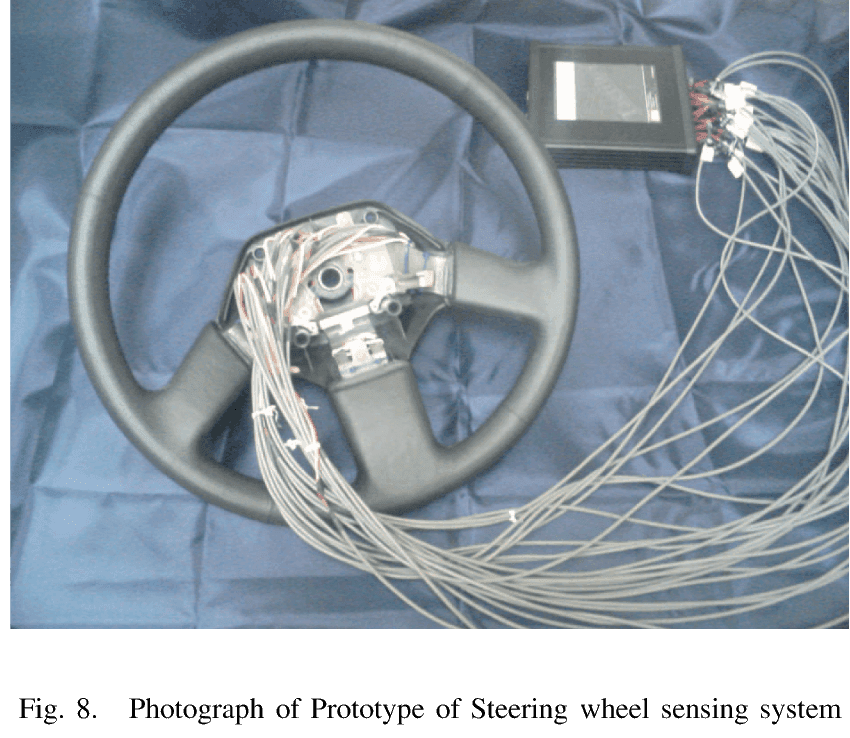
From the analysis results of driver’s grabbing style as shown in Fig.7, these points were decided as the high frequency grabbing points.
In this prototype system, all the sensor were installed on steering wheel framework, and finally, sensors were wrapped using artificial leather. As the results, wrapping artificial leather transmit the pressure to each point sensor, therefore, they has good sensitibity for grabbing force. And it will be also expected to make the effectiveness for the classification about their grabbing to “grabbing” or “putting” for the steering wheel.
V. CONCLUSION
In order to prevent the car accident, the assistance strategy for safe driving which focuses the normality of driver’s behavior has been proposed. As one of implementation of it, analysis method for the driver’s behavior by using the steering wheel operation have been examined. To validate the proposed method, fundamental experiments using Driving Simulator system have been conducted. The experimental results of grabbing style for steering wheel and statistical analysis using simple correlation between steering operation and vehicle velocity show the possibility to estimate the internal state of drivers. And finally, Prototype of Steering wheel Sensing system has been proposed based on these basic experiments and analysis. As the future work, much more experiments with subject person will be necessary in order to validate the relationship between the analysis results and internal state of driver. And moreover, the expriments with using proposed sensing system must be conduct in order to evaluate it.
ACKNOWLEDGMENT
Parts of this research were supported by Global COE Program “rontiers of Intelligent Sensing” from the Ministry of Education, Culture, Sports, Science and Technology, Japan and Nissan Science Foundation.
2008 IEEE International Conference on Systems, Man and Cybernetics (SMC 2008)
![]()