Ungarische Forscher haben Sensoren entwickelt, die Robotern dabei helfen, Widerstand und Objekte zu erspüren und ihre “Finger” daran anzupassen. Im Gegensatz zu komplexen bionischen Nervensystemen ist diese Spürkraft für Roboter weitaus günstiger zu realisieren: Silikon und Infrarotlicht helfen bei der Widerstandsmessung.
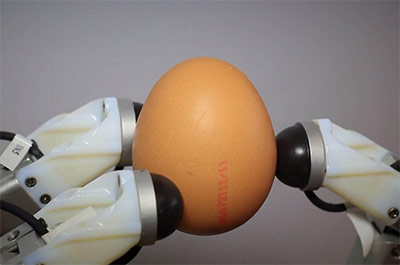
Aus der Forschung für ihre Doktorarbeit an der Pázmány Péter Universität haben Ákos Tar und József Veres nun ihr eigenes Unternehmen, Optoforce, gegründet. Die von Optoforce entwickelten Roboterfinger funktionieren so, dass einerseits die Silikonhalbkugel an der Fingerspitze durch Verformung auf Druck reagiert und andererseits das Infrarotlicht innerhalb der Silikonfingerspitze durch diese Verformung anders in der Halbkugel verteilt wird. Die so generierten Daten helfen der eingebauten Software, den Widerstand zu messen.
“Die Elektronik ist nicht in direktem Kontakt mit der einwirkenden Kraft oder dem Objekt. Unser Sensor hat eine sehr robuste Struktur – um ihn zu zerstören, muss man erst die Leiterplatte unter dem Silikon erreichen”, erklärt Tar gegenüber Wired.co.uk. “Dadurch haben wir eine sehr hohe Überlastungskapazität, der Sensor kann einer sehr starken Verformung standhalten.” Die elektronischen Komponenten im Inneren der Halbkugel sind Standardmaterialien. Die meiste Arbeit macht den Forschern die Silikonschicht, die diese schützt. Das ideale Silikongemisch sollte auch unter schwierigen Bedingungen nicht kaputtgehen und Temperaturen von minus 40 bis 85 Grad Celsius überstehen.
“Eine Sache, die wir uns ansehen, sind Service-Roboter. Weil Service-Roboter mit Menschen kooperieren müssen, ist es sehr wichtig, dass sie sicher mit einem Menschen kollidieren können”, erläutert Ákos Dömötör, ebenfalls von Optoforce. “Wenn jemand auf einen fällt oder ein Kind in jemanden hineinrennt, muss der Roboter das fühlen und sich anpassen, er kann nicht so steif wie die gängigen Roboter sein. Das ist etwas, wo wir einen klaren Vorteil haben, weil unser Sensor viel formbarer ist.”